




这篇博客太枯燥了,不想写,放一张yui的照片缓解枯燥吧😊
机器人的位姿
其实这篇博客要讲清楚最好结合图片讲解,但作者目前没有合适的画3D坐标系的工具,所以这里很多关系都是用文字的描述。这里还缺少部分的数学推导,如有需要的朋友可以看机器人学导论的第二章(个人感觉讲的比视觉SLAM14讲清楚)。
我们想要了解机器人在空间中的位置,通常给定参考坐标系,以及机器人位置\(x,y,z\)即可。当然,这是不考虑机器人姿态的情况下,通常情况下,如果只知道机器人的位置而不知道姿态,基本无法控制机器人。在2D下,通常用\(x,y,\theta\)来表示机器人的位置加姿态。机器人在空间中具体的位置加姿态通常用位姿来表示。也就是 \[ Pose=Translation+Rotation \] 位置(Translation)表示通常很简单,下面我直接讲解一下姿态的表示。
旋转矩阵
三维下姿态又很多种表示方式,这里先介绍旋转矩阵(最常用),其他的方式在后面介绍。
在三维空间下,为了更直观的理解物体的姿态,我们在机器人身上放一个右手坐标系(三轴正交),便于观察机器人的姿态变换。现在的问题变成了如何表示这个坐标系的姿态。
由于我这里不考虑位置,那么,我直接将坐标系放到原点便于观察。很容易想到,如果分别将三个轴对应的向量写下来,便能唯一表示一个姿态。把这三个轴的坐标(按列向量)写成矩阵,那么它就是旋转矩阵: \[ R=(\overrightarrow{x},\overrightarrow{y},\overrightarrow{z})= \begin{aligned} \begin{bmatrix} x_1 & y_1 & z_1\\ x_2 & y_2 & z_2\\ x_3 & y_3 & z_3 \end{bmatrix} \end{aligned} \] 根据上述旋转矩阵的定义,我们不难发现旋转矩阵的几个性质:
- 旋转矩阵是正交矩阵
- 如果\(^A_BR\)表示A参考系下B的旋转矩阵,那么B参考系下A的旋转矩阵为:\(^B_AR=^A_BR^T\)
对于上述第二个性质,如果要证明的话,可以将R矩阵写做内积形式,比如\(x_1=X_A\cdot X_B=|X_A|\cdot|X_B|\cos<X_A,X_B>\),也就是坐标系B在坐标系A下的投影。如果将矩阵中所有元素写成上述形式,可以发现矩阵的行向量为B在A坐标系下\(\overrightarrow{x},\overrightarrow{y},\overrightarrow{z}\)的投影,也即性质2所表达的内容。
顺便补充一下,二维右手坐标系下\(\theta\)角姿态对应的旋转矩阵为: \[ R= \begin{aligned} \begin{bmatrix} cos\theta & -sin\theta\\ sin\theta & cos\theta\\ \end{bmatrix} \end{aligned} \]
对应的,绕z轴旋转\(\theta\)对应的矩阵为: \[ R=\begin{aligned} \begin{bmatrix} cos\theta & -sin\theta & 0\\ sin\theta & cos\theta & 0\\ 0&0&1 \end{bmatrix} \end{aligned} \]
位姿
知道了旋转的表示,我们就可以表示机器人的位姿了。通常情况下,我们把坐标系写在左边,参考坐标系写在左上,而原点写在右下角。比如,我们要表示A坐标系下,B的位姿,就可以: \[ \left\{^A_BR,^AP_{BORG}\right\} \] 其中\(^A_BR\)表示B的姿态,\(^AP_{BORG}\)表示B原点的坐标。
这样的表示在计算时会带来很大的方便,后面将映射的时候就能体会到了,学会这种表达后,坐标变换有手就行😎
映射
这里有些地方也叫坐标变换,以前我刚学的时候,总是把算子和映射混着用,虽然很多时候表达式通用,但最好还是区分一下。后面的介绍中,注意区分点和坐标系,点是不带姿态的,坐标系是带姿态的,两者搞混淆后阅读起来就不知所云了。
很多时候,我们想要在不同坐标系下表达同一个东西,比如知道小车在里程计坐标系下的位姿,想要得到小车在全局地图坐标系下的位姿,就涉及到坐标的转换,可以说是经常需要用到的。
对于只有平移的映射,我们可以直接用矢量相加的方法求某个点的坐标,比如,已知P点在B坐标系下的坐标,以及A坐标系在B坐标系下的坐标,求P点在A坐标系下的坐标就可以: \[ ^AP=^BP+^AP_{BORG} \] 而对于只有旋转,即已知P点在B坐标系下的坐标,以及B坐标系在A坐标系下的旋转,那么我们可以得到点在A坐标系下的旋转: \[ ^AP=^A_BR^BP \]
上述表达式通过线性代数的知识很好理解,由于\(^A_BR\)的列向量是B坐标系的基向量,上述表达式就是一个坐标变换公式:
\[
^AP=(\overrightarrow{e_1},\overrightarrow{e_2},\overrightarrow{e_3})\times\begin{aligned}\begin{bmatrix}x\\y\\z\end{bmatrix}\end{aligned}=x\cdot\overrightarrow{e_1}+y\cdot\overrightarrow{e_2}+z\cdot\overrightarrow{e_3}
\]
而对于既有旋转又有平移的变换,要计算B坐标系下的P点在A坐标系下的坐标,我们可以将其分两步:首先通过坐标变换,得到和A相同姿态的A'坐标系下P点的坐标,这时候A'坐标系和B坐标系只有平移关系了,再通过平移得到P再B坐标系下的坐标。即:
\[
^AP=^A_BR^BP+^AP_{BORG}
\]
上述计算虽然直观,但是在推导表达式时,有时候面对连续多个变换(A到B再到C再到D),如果还用上述变换的方式,写出来的表达式非常复杂,于是人们引入一种叫齐次变换矩阵的概念,其定义如下: \[ ^A_BT=\left[\begin{array}{ccc:c} &^A_BR&&^AP_{BORG}\\ \hdashline0&0&0&1 \end{array}\right] \]
有了其次变换矩阵,我们可以将坐标变换写成矩阵形式: \[ \left[\begin{array}{1}^AP\\1\end{array}\right]=^A_BT^BP=\left[\begin{array}{ccc:c} &^A_BR&&^AP_{BORG}\\ \hdashline0&0&0&1 \end{array}\right]\left[\begin{matrix}^BP\\1\end{matrix}\right] \] >这里面最右边再坐标底下再加一个1的坐标叫做齐次坐标,有时候他和普通坐标会混用,需要根据矩阵自行考虑是否加1
这时候对于多个变换,我们就会惊奇的发现,其上下标消除的特点,比如将C坐标系下的点P变换到B坐标系下,再变换到A坐标系下,就有:
\[
^AP=^A_BT^B_CT^CP
\] 由于\(^A_BT\)和\(^B_CT\)都是\((4\times4)\)的矩阵,根据矩阵相乘的结合律,我们可以将其合在一起,而合在一起的这个变换显然直接表示了坐标系C到A的齐次变换矩阵,即:
\[
^A_CT=^A_BT^B_CT=\left[\begin{array}{ccc:c}
&^A_BR^B_CR&&^A_BR^BP_{CORG}+{^A}P_{BORG}\\
\hdashline0&0&0&1 \end{array}\right]
\]
我们发现,这个过程有点像左边左下角的角标把右上角的角标消掉了,在实际计算各个坐标变换时,我们常用这种方法来帮助理解和简化计算,是不是非常方便😊。对于其次变换矩阵,其逆虽然不再等于转置,但也有快速计算方法:
\[
^B_AT=^A_BT^{-1}=\left[\begin{array}{ccc:c}
&^A_BR^{T}&&-^A_BR^T\times{^A}P_{BORG}\\
\hdashline0&0&0&1 \end{array}\right]
\]
算子
简单理解,映射就是一个物体在不同坐标系之间转换,而算子就是在同一个坐标系下,将P点移动到P'点的变换矩阵。
有时候我们要移动一个点,比如让激光点云旋转10°,或者让激光点云向前平移10cm,这时候怎么做呢?这样的操作和变换有什么关系呢?直接说结论:包含旋转R和平移Q的变换与描述某个坐标系旋转R并平移Q的变换是相同的。
首先考虑简单的平移,将点P向前移动\(x\),其移动后的坐标为: \[ P'=P+\begin{bmatrix}x\\0\\0\end{bmatrix} \] 显然,这和坐标系B在坐标系A前面\(x\)的平移变换是一致的。
然后考虑旋转,将P点绕Z轴旋转\(\theta\),那么旋转后的P点位置如何计算呢?我们可以使用映射的方法计算,思考一下,如果将P点绕Z轴旋转\(\theta\),就相当于把坐标轴旋转\(-\theta\),假设原始坐标系是A,旋转后新坐标系为B,那么我们就可以将上述过程转化为计算B坐标下P点的坐标,首先计算旋转矩阵\(^B_AR\),即B为参考坐标系下A坐标系的姿态: \[ ^B_AR=\begin{aligned} \begin{bmatrix} cos\theta & -sin\theta & 0\\ sin\theta & cos\theta & 0\\ 0&0&1 \end{bmatrix} \end{aligned} \] 可以得到旋转\(\theta\)后P点的坐标为: \[ P'=R\times P=^B_AR\times P \] 也就是说,旋转也满足上述结论,将旋转和平移结合一下,那么就可以得到我最开始得到的结论🫡
绕固定轴旋转
绕一个固定轴旋转的旋转矩阵经常使用,我这里记录一下绕不同轴旋转得到的矩阵(实际上根据旋转矩阵的定义也能很快确定),方便后面参考使用。
下面的表达式中使用简写\(crx\)代表\(\cos(\theta_x)\),也就是x轴方向旋转\(\theta_x\)的\(\cos\)值,\(srx\)同理。
绕x轴旋转得到的旋转矩阵: \[ R_{rx}= \begin{aligned} \begin{bmatrix} 1&0&0\\0&crx&-srx\\0&srx&crx \end{bmatrix} \end{aligned} \] 绕y轴旋转得到的旋转矩阵: \[ R_{ry}=\begin{aligned}\begin{bmatrix}cry&0&sry\\0&1&0\\-sry&0&cry\end{bmatrix}\end{aligned} \] 绕z轴旋转得到的旋转矩阵: \[ R_{rz}=\begin{aligned}\begin{bmatrix}crz&-srz&0\\srz&crz&0\\0&0&1\end{bmatrix}\end{aligned} \]
欧拉角和旋转向量
上面讲了这么多,相信大家都觉得挺简单的,自己映像中好像没这么简单吧(・∀・(・∀・(・∀・*),印象中好像还有什么左手坐标系,右手坐标系、雷达坐标系、相机坐标系、内旋、外旋、X-Y-Z、rpy...什么的。这部分可以说是新手的噩梦😰,让人闻风丧胆。不过不要担心,某奥里给曾经说过,战胜恐惧的最好办法就是面对恐惧,干就完了,奥里给!!!!
学会了上一章节,相信代码中的各种变换能轻而易举的看懂,毕竟不管是Eigen库还是ros的tf库,其都支持上述的乘法形式的坐标变换,但很多时候,我们为了图方便并不喜欢用矩阵来表达姿态。比如有人问你相机姿态是多少,相信没人想听别人说出一个旋转矩阵。而欧拉角就解决了这一痛点。当然,四元数是解决了欧拉角的痛点。
坐标系
首先,要声明一点的就是,坐标系放在这里讲,表明上述的旋转矩阵在所有坐标系下都是通用的。不管坐标系是左手,右手,x轴朝前等等,绕z轴得到的旋转矩阵都是上面所提到的旋转矩阵,不过由于坐标系的定义不同,旋转出来的物理(实际)效果可能完全不同。
坐标系这里放一小章讲并不是因为它内容多,而是因为它很容易让新手(比如当初的我)混淆。这里介绍一些常用的坐标系:
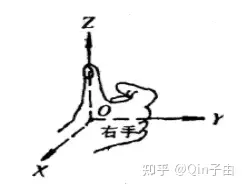
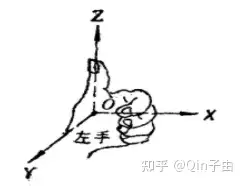
- 左/右手坐标系
左右手坐标系的定义如下图所示,大拇指指向z轴,其余四指由x轴握向y轴,哪只手成功即为对应的坐标系:
- Lidar坐标系
Lidar坐标系一般如下图所示,即x轴朝前的右手坐标系:

- 相机坐标系
相机坐标系一般如下图所示,即z轴朝前的右手坐标系:
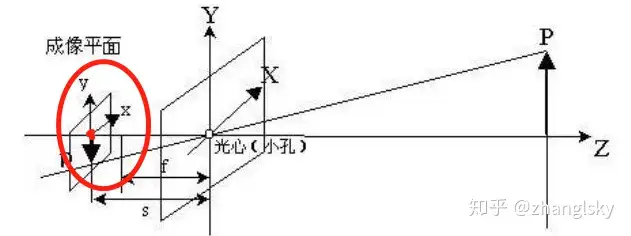
这里所谓的超前就是正放,比如雷达正放和相机正放。
- Lidar坐标系转相机坐标系
很显然,由上面可知,Lidar坐标系和相机坐标系是不一样的,如果两个传感器都正放在车上,要对Lidar和相机的参数做联合优化时,往往需要把Lidar坐标系转换到相机坐标系,根据上图关系可以知道,如果一个点云的坐标为\((x,y,z)\),那么将他转化到相机坐标系,他的坐标为\((y,z,x)\)。
同时,绕不同轴转的角度也需要对应的转换,比如绕x轴转rx,对应到相机坐标系为绕z轴转rx。这里需要结合后面欧拉角看。
欧拉角
这部分非常绕,我下面讲解的东西虽然在某些情况下好像能用,但是换一个环境好像又对不上了,感觉不同的教材,不同的软件定义不同,使用时还是要注意以下,不过大体上是对的
欧拉角的思想很简单,将空间中任意一个姿态分解成3个顺序旋转(也就是说按照规则转3次后得到姿态)。这样就可以用3个变量表示空间中任意姿态了。根据旋转的规则不同,欧拉角的值也有所不同。由于欧拉角按顺序旋转,旋转的方式有很多种,可以按下分类:
绕固定轴旋转(外旋):X-Y-Z,Z-X-Y...
绕旋转后的轴旋转(内旋):X-Y-Z,Z-X-Y...
举个例子,Z-Y-X外旋,就是先绕Z轴转,再绕Y轴转,最后X轴转,这里面的xyz轴是固定的。而Z-Y-X内旋就是绕Z轴转后,绕旋转后坐标系的Y轴转下一次。朋友们可以拿身边的物体试一下,这两种转法是不一样的。通常情况下,绕固定轴旋转,每次旋转都是左乘旋转矩阵,这点和我们之前讲的算子一样,比如绕Z轴转\(R_z\),再绕Y轴旋转\(R_y\),最后绕X轴旋转\(R_x\),其旋转矩阵为: \[
R=R_x\times R_y\times R_z
\]
而内旋都是右乘旋转矩阵,所以内旋Z-Y-X和外旋X-Y-Z得到的旋转矩阵相同(也可以自己用物体试验一下,真是难以理解呢,太神奇了)。上述的旋转顺序如果是内旋,得到的旋转矩阵为:
\[
R=R_z\times R_y\times R_x
\]
对于不同的旋转方式,所对应的运算也不相同。为了便于讨论,在机器人领域中,我们常用rpy角,rpy角是一种特殊的欧拉角,其规则为:旋转顺序:Y-P-R,或则说是Z-Y-X(不一定?跟坐标系定义有关),绕旋转后的轴旋转(内旋)。我这里参考的是视觉SLAM14讲上的定义,同时,我注意到网上有很多跟其定义的不一样,使用时注意区分。
需要注意的是,机器人领域中的rpy角一般是指在Lidar坐标系下的旋转,如果是相机坐标系下,旋转顺序需要做一定的转化。
rpy角和旋转矩阵的转换方式如下(我这里的zyx是对应于lidar的,相当于z在上x向前的右手坐标系,对于不同的坐标系得到的结果也不同) \[ \begin{eqnarray} R&=&R_{yaw}\times R_{pitch}\times R_{roll}=R_{rz}\times R_{ry}\times R_{rx}\\ &=&\begin{bmatrix}crz\cdot cry&-srz\cdot crx+crz\cdot sry\cdot srx&srz\cdot srx+crz\cdot sry\cdot crx\\srz\cdot cry&crz\cdot crx+srz\cdot sry\cdot srx&-crz\cdot srx+srz\cdot sry\cdot crx\\-sry&cry\cdot srx&cry\cdot crx\end{bmatrix}\end{eqnarray} \]
对于不同坐标系,比如相机坐标系(z朝前的右手坐标系),yaw角对应的就是\(R_{ry}\)。总之公式前半部分一定是对的,后半部分根据坐标系不同需要注意一下。同时,这里是内旋,所以旋转对应右乘。
到这里,我们就把欧拉角介绍清楚了,虽然表面上把变量从9个减少到了3个,但却更容易混淆了,旋转矩阵只需要给定坐标系、旋转矩阵两个量就能唯一确定一个旋转,而欧拉角需要坐标系、旋转顺序、内旋/外旋、旋转角度才能唯一确定一个旋转,可以说是真让人头大。那么有没有什么方法既可以减少变量,由不容易混淆(没有奇异)呢。下面介绍四元数。
>其实这里还有一个问题,就是如何从旋转矩阵得到欧拉角,做法其实不复杂,根据上述转换关系,通过矩阵内部元素之间的乘除法可以得到对应欧拉角的正弦、余弦、正切值等,然后通过反三角计算即可
旋转向量
旋转向量在求导时经常用到相关概念,以我目前的认知来看,我认为是旋转向量和梯度很像,他既有方向,又有大小,即像内旋一样取决于当前姿态,又没有各种歧义。这部分在后面的李群和李代数中非常有用
简单来讲,旋转向量就是一个向量,向量的方向表示旋转轴,向量的大小表示旋转角度,通常用符号\(\phi\)表示。为了后面便于理解,需要先引入一些概念,首先是外积: \[ \pmb{a}\times \pmb{b}=\begin{aligned}\begin{bmatrix}a_2b_3-a_3b_2\\a_3b_1-a_1b_3\\a_1b_2-a_2b_1\end{bmatrix}\end{aligned}=\begin{aligned}\begin{bmatrix}0&-a_3&a_2\\a_3&0&-a_1\\-a_2&a_1&0\end{bmatrix}\end{aligned}\pmb{b}=\pmb{a}^{\wedge}b \] 这里和普通外积一样,主要是引入一个符号\(\wedge\),将该符号称为反对称符号,他的功能是将向量转成对应的一个反对称矩阵,还有一个符号\(\vee\)表示将对应的反对称矩阵转化为向量,这是一个一一对应的关系: \[ \pmb{a}^{\wedge}=\begin{aligned}\begin{bmatrix}0&-a_3&a_2\\a_3&0&-a_1\\-a_2&a_1&0\end{bmatrix}\end{aligned} \] 一个旋转向量可以唯一表示一个姿态,那么他对应了一个旋转矩阵,将旋转向量分解为模乘以方向的形式\(\phi=\theta\pmb{n}\),那么旋转向量和旋转矩阵的关系由罗德里格斯公式给出: \[ R=\cos\theta I+\left(1-\cos\theta\right)\pmb{n}\pmb{n}^T+\sin\theta\pmb{n}^{\wedge} \] 同样,旋转矩阵也可以转化成旋转向量,对上述罗德里格斯公式两边同时取迹可以得到: \[ \theta = \arccos\frac{tr{(R)}-1}{2} \] 而根据旋转轴旋转后不变可得\(R\pmb{n}=\pmb{n}\)可得:旋转轴为\(R\)中特征值1对应得特征向量,根据本科求特征值特征向量得方法的知识即可求出 > 这里还是简单说一下,根据\(\left(A-\lambda E\right)x=0\),先求\(\lambda\)再带入求解\(x\),不过这里\(\lambda=1\)是已知结果,可以带入后直接求解对应的\(x\)
四元数
如果说欧拉角是最容易混淆的,那么四元数就是最难理解的😭。
有一些复数基础的朋友都知道复数乘以\(e^{i\theta}\)就是将复数在复平面旋转\(\theta\)(我本科做图片旋转的作业时,就是将每个点转化成复数,再乘以\(e^{i\theta}\)得到旋转后的像素坐标)。而四元数就相当于三维空间上的复数,我们先介绍以下四元数的基本概念和性质,再使用他来表示姿态。
四元数基本概念和性质
四元数一般用符号\(q\)(quaternion)表示,拥有一个实部和三个虚部,如下所示(实部不一定在前面): \[ \pmb{q}=q_0+q_1i+q_2j+q3k \] 其中,\(i,j,k\)为虚部,他们之间满足: \[ \left\{\begin{align*}\begin{array}{l}i^2=j^2=k^2=-1\\ij=k,ji=-k\\jk=i,kj=-i\\ki=j,ik=-j\end{array}\end{align*}\right. \] 通常情况下,我们喜欢用一个标量和一个向量来表示四元数: \[ \pmb{q}=\left[s,\pmb{v}\right]^T,\ s=q_0\in R,\ \pmb{v}=\left[q_1,q_2,q_3\right]^T\in R^3 \] 如果一个四元数实部为0,称为虚四元数,若虚部为0,则称为实四元数,接下来讲解一下四元数的运算,设有两个四元数: \[ \pmb{q}_a=\left[s_a,\pmb{v}_a\right]=s_a+x_ai+y_aj+z_ak \\ \pmb{q}_b=\left[s_a,\pmb{v}_a\right]=s_a+x_ai+y_aj+z_ak \]
四元数加减法
\[ \pmb{q}_a\pm\pmb{q}_b=\left[s_a\pm s_b,\pmb{v}_a\pm\pmb{v}_b\right] \]
乘法
\[ \begin{align*} \pmb{q}_a\pmb{q}_b=& s_as_b-x_ax_b-y_ay_b-z_az_b\\ &+\left(s_ax_b+x_as_b+y_az_b-z_ay_b\right)i\\ &+\left(s_ay_b-x_az_b+y_as_b+z_ax_b\right)j\\ &+\left(s_az_b+x_ay_b-y_ax_b+z_as_b\right)k \end{align*} \] 这里其实就是两数相乘的结果,写法上,上式是保证左边字母顺序是\(s_a,x_a,y_a,z_a\),右边就是乘积为对应维度的值,写成向量的形式有 \[ \pmb{q}_a\pmb{q}_b=\left[s_as_b-v_a^Tv_b,s_av_b+s_bv_a+v_a\times v_b\right]^T \] 根据上面所示,显然实四元数相乘仍未实四元数、虚四元数相乘认为虚四元数,且四元数的乘法不满足交换律
模长
\[ \left\|\pmb{q}_a\right\|=\sqrt{s_a^2+x_a^2+y_a^2+z_a^2} \] 两个四元数乘积的模等于模的乘积: \[ \left\|\pmb{q}_a\pmb{q}_b\right\|=\left\|\pmb{q}_a\right\|\left\|\pmb{q}_b\right\| \]
共轭
和复数一样,共轭就是虚部取相反数: \[ \pmb{q}_a^*=s_a-x_ai-y_aj-z_ak=\left[s_a,-\pmb{v}_a\right]^T \] 和复数一样,四元数和自身共轭的乘积为模长的平方: \[ \pmb{q}_a^*\pmb{q}_a=\pmb{q}_a\pmb{q}_a^*=\left[s_a^2+\pmb{v}_a\pmb{v}_a^T, 0\right] \]
逆
其实就是\(1/\pmb{q}\),和复数类似,可以上下同时乘以共轭得到: \[ \pmb{q}^{-1}=\frac{\pmb{q}^*}{\left\|q\right\|^2} \] 显然,其逆和自身乘积为1: \[ \pmb{q}^{-1}\pmb{q}=\pmb{q}\pmb{q}^{-1}=1 \] 如果\(q\)为单位四元数,其逆等于共轭,四元数乘积的逆具有和矩阵类似的性质: \[ \left(\pmb{q}_a\pmb{q}_b\right)^{-1}=\pmb{q}_b^{-1}\pmb{q}_a^{-1} \]
数乘
\[ k\pmb{q}=\left[ks,k\pmb{v}\right] \]
四元数表示旋转
这里我主要讲解一些公式,没有几何上的解释
使用四元数表示的旋转
首先,我们需要记住一点,一个单位四元数对应了一个唯一的旋转,如果将该旋转作用在\(\pmb{p}\)点上,让其变成\(\pmb{p}'\)需要两步:
首先用虚四元数表示空间中的\(\pmb{p}=[x,y,z]\)点
\[ \pmb{p}=[0,x,y,z]^T=[0,\pmb{v}]^T \]
旋转后的点为
\[ \pmb{p}'=\pmb{q}\pmb{p}\pmb{q}^{-1} \] 这里旋转后的为纯虚四元数,其虚部为旋转后的点的坐标
和其他旋转的关系
为了和旋转矩阵扯上关系,我们先定义两个符号,用于将四元数转化成矩阵,设\(\pmb{q}=[s,\pmb{v}]^T\),定义符号\(^+\)和\(^{\bigoplus}\)为: \[ \pmb{q}^+=\begin{aligned}\begin{bmatrix}s&-\pmb{v}^T\\\pmb{v}&s\pmb{I}+\pmb{v}^{\wedge}\end{bmatrix}\end{aligned},\ \pmb{q}^{\bigoplus}=\begin{aligned}\begin{bmatrix}s&-\pmb{v}^T\\\pmb{v}&s\pmb{I}-\pmb{v}^{\wedge}\end{bmatrix}\end{aligned} \] 有了上述符号,我们可以把四元数乘法写成矩阵的形式: \[ \pmb{q}_1^+\pmb{q}_2=\begin{aligned}\begin{bmatrix}s_1&-\pmb{v}_1^T\\\pmb{v}_1&s_1\pmb{I}+\pmb{v}_1^{\wedge}\end{bmatrix}\end{aligned}\begin{aligned}\begin{bmatrix}s_2\\v_2\end{bmatrix}\end{aligned}=\begin{aligned}\begin{bmatrix}-\pmb{v}_1^T\pmb{v}_2+s_1s_2\\s_1\pmb{v}_2+s_2\pmb{v}_1+\pmb{v}_1^{\wedge}\pmb{v}_2\end{bmatrix}\end{aligned}=\pmb{q}_1\pmb{q}_2=\pmb{q}_2^{\bigoplus}\pmb{q}_1 \] 我们就可以写出四元数和旋转矩阵的关系(证明见最后): \[ \pmb{R}=\pmb{v}\pmb{v}^T+s^2\pmb{I}+2s\pmb{v}^{\wedge}+\left(\pmb{v}^{\wedge}\right)^2 \tag{1} \] 有了R,就可以很容易得到和旋转向量之间的关系(证明见最后): \[ \left\{\begin{align*}\begin{array}{l} \theta = 2\arccos q_0\\ \left[n_x,n_y,n_z\right]^T=\left[q_1,q_2,q_3\right]^T/\sin\frac{\theta}{2} \end{array}\end{align*}\right.\tag{2} \]
其他变换
除了上述欧式变换之外,常见的还有如下3种变换
相似变换
相比欧式变换多了一个自由度,可以对物体进行均匀缩放 \[ \begin{aligned}\begin{bmatrix}s\pmb{R}&\pmb{t}\\\pmb{0}^T&1\end{bmatrix}\end{aligned} \]
仿射变换(正交投影)
形式如下所示: \[ \begin{aligned}\begin{bmatrix}\pmb{A}&\pmb{t}\\\pmb{0}^T&1\end{bmatrix}\end{aligned} \] 仿射变换只要求矩阵\(\pmb{A}\)为可逆矩阵,而不必须是正交矩阵,放射变换后立方体不一定是方的,单各个面仍然平行
射影变换
形式如下所示: \[ \begin{aligned}\begin{bmatrix}\pmb{A}&\pmb{t}\\\pmb{a}^T&v\end{bmatrix}\end{aligned} \] 左上角为可逆矩阵\(\pmb{A}\),右上角为平移\(\pmb{t}\),左下角为缩放\(\pmb{a}\),右下角的\(v\)其实只有1和0两种取值(其他值时可以对矩阵除以\(v\)转化成1),这里左下角的意义涉及到齐次坐标的来源,可以自行百度,这里给一个介绍的还不错的博客:什么是齐次坐标? - 知乎 (zhihu.com)。
从真实世界到相机照片可以看作一个射影变换,变换后平行关系由于近大远小可能变成相交关系。

总结
各种变换之间的性质比较如下所示
| 变换名称 | 矩阵形式 | 自由度 | 不变性质 |
|---|---|---|---|
| 欧式变换 | \(\begin{aligned}\begin{bmatrix}\pmb{R}&\pmb{t}\\\pmb{0}^T&1\end{bmatrix}\end{aligned}\) | 6 | 长度、夹角、体积 |
| 相似变换 | \(\begin{aligned}\begin{bmatrix}s\pmb{R}&\pmb{t}\\\pmb{0}^T&1\end{bmatrix}\end{aligned}\) | 7 | 体积比 |
| 仿射变换 | \(\begin{aligned}\begin{bmatrix}\pmb{A}&\pmb{t}\\\pmb{0}^T&1\end{bmatrix}\end{aligned}\) | 12 | 平行性、体积比 |
| 射影变换 | \(\begin{aligned}\begin{bmatrix}\pmb{A}&\pmb{t}\\\pmb{a}^T&v\end{bmatrix}\end{aligned}\) | 15 | 接触平面的相交和相切 |
相关证明
公式(1)证明
考虑对\(\pmb{p}\)点进行旋转,可得: \[ \begin{align*} \pmb{p}'&=\pmb{q}\pmb{p}\pmb{q}^{-1}=\pmb{q}^+\pmb{p}^+\pmb{q}^{-1}\\ &=\pmb{q}^+\left(\pmb{q}^{-1}\right)^{\bigoplus}\pmb{p} \end{align*} \] 将矩阵形式带入后得到(这里用到了单位四元数逆等于共轭的性质): \[ \pmb{q}^+\left(\pmb{q}^{-1}\right)^{\bigoplus}=\begin{aligned}\begin{bmatrix}s&-\pmb{v}^T\\\pmb{v}&s\pmb{I}+\pmb{v}^{\wedge}\end{bmatrix}\end{aligned}\begin{aligned}\begin{bmatrix}s&\pmb{v}^T\\-\pmb{v}&s\pmb{I}+\pmb{v}^{\wedge}\end{bmatrix}\end{aligned}=\begin{aligned}\begin{bmatrix}1&\pmb{0}\\\pmb{0}^T&\pmb{v}\pmb{v}^T+s^2\pmb{I}+2s\pmb{v}^{\wedge}+\left(\pmb{v}^{\wedge}\right)^2\end{bmatrix}\end{aligned} \] 再根据矩阵的分块乘法,很容得到右下角矩阵乘以\(\pmb{p}\)等于旋转后的结果,即右下角矩阵为旋转矩阵
公式(2)证明
根据旋转矩阵到旋转向量的转换方式,我们先计算旋转矩阵的迹: \[ \begin{align*} tr(\pmb{R})&=tr(\pmb{v}\pmb{v}^T)+3s^2+2s\cdot0+tr(\left(\pmb{v}^{\wedge}\right)^2)\\ &=v_1^2+v_2^2+v_3^2+3s^2-2\left(v_1^2+v_2^2+v_3^2\right)\\ &=\left(1-s^2\right)+3s^2-2\left(1-s^2\right)\\ &=4s^2-1 \end{align*} \] 然后,我们就可以得到\(\theta\)的计算公式 \[ \begin{align*} \theta&=\arccos(\frac{tr(\pmb{R})-1}{2})\\ &=\arccos(2s^2-1) \end{align*} \] 即: \[ \cos\theta=2s^2-1 \] 又因为: \[ \cos\theta=2\cos^2\frac{\theta}{2}-1 \] 对比可得: \[ \theta=2\arccos(s) \] 最后就是计算旋转轴,将\(\pmb{q}\)的虚部带入\(\pmb{p}\)的虚部,可以发现: \[ \pmb{p}=\pmb{q}\pmb{p}\pmb{q} \] 即\(\pmb{q}\)的虚部\([q_1,q_2,q_3]^T\)旋转后不变,即为旋转轴,将归一化即可得到旋转轴,其模长为 \[ \sqrt{q_1^2+q_2^2+q_3^2}=\sqrt{1-s^2}=\sqrt{1-\cos^2\frac{\theta}{2}}=\sin\frac{\theta}{2} \]

